
Positioning systems refer to the tracking and location identification of assets and personnel within a confined area, such as in buildings, campuses, ports, and warehouses. With the rapid growth of data and multimedia services, the demand for accurate positioning and navigation has significantly increased. As a result, positioning technology has emerged as a promising industry and one of the most active research fields in the 21st century. Currently, common positioning technologies include infrared, ultrasonic, GPS, and Wi-Fi. However, these technologies suffer from limitations such as limited coverage, poor resistance to interference, and low accuracy. To address these issues, this paper presents an active RFID-based positioning system, which offers a more effective solution suitable for a wider range of applications.
### Analysis of Positioning Technologies
Infrared positioning is typically limited to short-range applications and is easily affected by ambient lighting, such as fluorescent or room lights. This makes it unsuitable for large-scale or high-accuracy scenarios. Similarly, ultrasonic positioning, while capable of covering longer distances, is highly susceptible to multipath effects and non-line-of-sight propagation, making it less reliable in indoor environments. GPS, on the other hand, is widely used for outdoor positioning due to its global coverage. It relies on satellite signals to determine location, but these signals are weak indoors and cannot penetrate structures, limiting its use to open areas. Wi-Fi positioning is cost-effective and suitable for small-scale indoor or outdoor applications, but it has limited coverage (typically up to 90 meters) and is prone to interference, affecting both accuracy and energy efficiency.
To overcome these challenges, this paper proposes an RFID-based positioning system. Compared to existing technologies, RFID offers advantages in cost, environmental adaptability, and positioning accuracy. It can cover larger areas, requires minimal environmental setup, and allows for the retrieval of detailed information about tagged objects.
### System Composition
The active RFID positioning system described in this paper consists of four main components: the reader, the tag, the communication network, and the backend server, as illustrated in Figure 1.
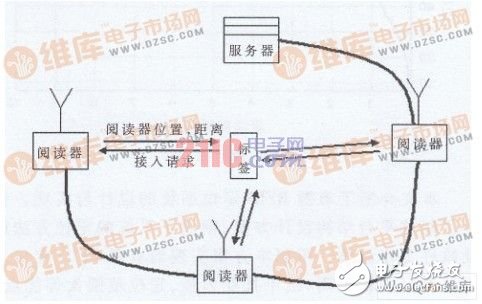
Figure 1: System composition
Each reader stores its own location information and communicates with tags via radio frequency. The distance between the tag and the reader is measured using radio frequency communication, allowing for position calculation. This information is then sent back to the reader, which transmits it through the communication network to the backend server. The server can also control the readers remotely over the network.
Once the system is deployed, the tags can determine their own positions using radio frequency and upload the data to the backend server. The server collects all tag information and provides a web-based service for real-time location tracking.
### Hardware Structure
Both the tag and the reader share a similar hardware structure, consisting of the following key components: a main controller, a wireless RF transceiver and ranging module, an antenna, and a power supply system. The system block diagram is shown in Figure 2.
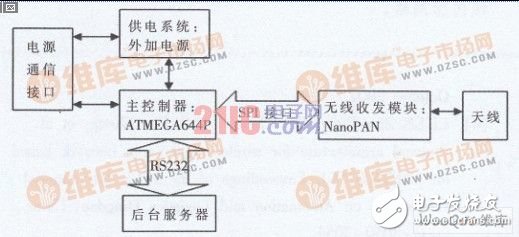
Figure 2: System schematic
To meet the demands of high-speed data processing and network communication, the system uses Atmel’s ATmega64 microcontroller. This chip features a Harvard architecture, a single-cycle RISC instruction set, and internal hardware multiplication, enabling fast data processing. It also includes I/O ports that can drive high-current loads and supports external memory expansion. The ATmega64 offers online programming (ISP) and in-application programming (IAP), making it easy to update and debug the software on-site. Additionally, it features an SPI serial interface that supports both master and slave modes, facilitating communication with other serial units.
The wireless RF transceiver and ranging module employs the Nanotron NanoPAN module, which utilizes Wideband Linear Frequency Modulation Spread Spectrum (CSS) technology and complies with the IEEE 802.15.4a standard. Operating at the 2.4 GHz ISM band, this module supports data rates ranging from 31.25 kbps to 2 Mbps and offers point-to-point ranging accuracy within 1 to 2 meters. It also provides reliable data communication with an extended transmission range. The module integrates a MAC controller, reducing the burden on the microprocessor and simplifying the development of high-level systems.
The antenna section is designed with a direct matching configuration. Due to space constraints, the wireless transceiver module is directly connected to the antenna using wires. The design incorporates ferrite shielding to minimize the impact of nearby metal objects and electromagnetic shielding to reduce the magnetic field generated by the antenna coil itself. To create a shielded antenna on the PCB, at least four layers are required, with the top and bottom layers containing non-closed shielded loops. These loops provide electromagnetic shielding and enhance the system's electromagnetic compatibility.
FPV Drones 7 10 13 Inch Heavy Payload Long time Flight with Night Vision Camera Racing FPV Drones,I hope this drone can bring you passion and happiness. Please do not use it for war

FPV uav used for throwing,Night Vision Camera Racing FPV Drones,Customized Throwing FPV drone,FPV Unmanned Aerial Vehicle Used for Throwing
Jiangsu Yunbo Intelligent Technology Co., Ltd , https://www.fmodel-ai.com